UAVレーザー測量 / UAV 写真測量
革新的なドローン計測システム“Terra Lidar R”と“Zenmuse P1”を導入しました!
【LiDARシステム:TerraLidar R】
【スマートオブリークカメラ:Zenmuse P1】
当社では、測量・インフラ点検・3Dデータ活用の高度化に向け、高精度高密度点群データを計測できるLiDAR※1システムと、よりリアルな3Dモデリングを可能にするスマートオブリークカメラ※2を導入しました。
【LiDARシステム:TerraLidar R】
TerraLidar Rは、通常よりも高高度(推奨する最大対地高度120m)から1秒間に50万発のレーザー光を地上に照射し、公共測量に必要な精度(出来形±5cm、起工±10cm)を実現することができる、革新的なLiDARシステムです。対地高度を高く設定できることに加えて視野角が75°と広く、従来のLiDARシステムに比較して広範囲の計測に対応できるという特長があります。また地上からの反射光を最大8エコー計測することができ、草本類が比較的生い茂った場所でも高精度に地形を計測することができます※3。
【スマートオブリークカメラ:Zenmuse P1】
Zenmuse P1は、チルト・ロール・パンを安定制御できる3軸ジンバルに、低ノイズ・高感度な4500万画素のフルフレームセンサを搭載した、写真測量専用カメラシステムです。画像歪みの少ないグローバルシャッター※4などの技術によって、写真測量の精度は地上基準点なしでも水平3cm/垂直5cmを実現しています。
これらの機器を導入したことにより、
- ドローンLiDAR、地上設置型LiDAR、そして写真測量のハイブリッド計測によって、3Dモデリングや出来高管理といった様々な目的に応じた、最適な計測サービスを提供できるようになりました。
- 計測から納品までに時間がかかっていたドローンLiDAR計測のワークフローをワンストップ化し、広域・高精度の地形計測に迅速に対応できるようになりました。
- 高密度点群データの特長を活かし、森林資源解析や調査員による踏査が危険な法面点検など、様々な業務への活用を検討します。
当社は、今後も最新技術の積極的な導入を通じて、お客様の課題解決と地域社会への貢献を目指してまいります。
※1 LiDAR(ライダー)は「Light Detection And Ranging」の略称で、空中(ドローン)から地上に向けてレーザー光を照射し、その反射時間によって地形や建物の形状などを高精度に計測するシステムです。3次元レーザースキャナーとも言います。
※2 直下写真だけでなく斜め写真を自動的に撮影することができる、写真測量専用カメラです。斜め方向から撮影することによって、建物の壁面や法面の状況を正確に反映し、3次元空間をリアルに再現することができます。
※3 例えばドローンから森林に向かって照射したレーザー光は、樹頂点、枝、幹、下層の草本、浮石、そして地面などで反射されます。LiDARシステムのレーザー光はドローンに近い距離にある地物から順番に反射されることから、エコー数が少ないと地面に到達する前に樹頂点や枝などで反射されてしまいます。その一方で、エコー数が多くなると樹冠の下層にある地物や地面からの反射を計測しやすくなり、地形の計測精度が向上します。
※4 グローバルシャッターは、デジタルカメラが1枚の写真を撮影するときに画面全体を一度にスキャンする方式です。一般的なデジタルカメラは画面の上から下に順番にスキャンしていくローリングシャッターを採用しており、ドローンのように飛行(移動)しながら撮影すると、写真の上と下でシャッタータイミングのズレに伴う特徴的な歪みが生じます。ローリングシャッターカメラで写真測量をするためには特殊な補正技術が必要になります。
※5 ドローンが飛行できないトンネル坑内は地上設置型LiDAR(Leica RTC360)を用いて点群データを計測し、後処理によってTerraLidar Rの点群データと統合しました。
※6 点群データにおける点のひとつひとつを、楕円体形状の光の拡がりを持つ「ぼかした点」として表現することによって、リアルに3次元空間を再現する手法です。
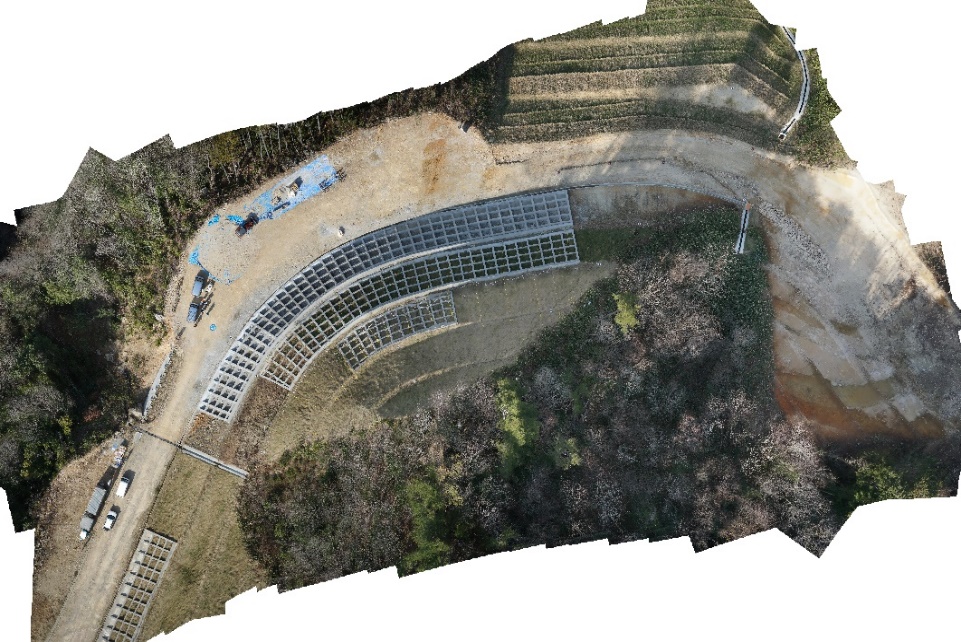
写真測量によるオルソー画像
オルソー(無歪)画像
接合された写真データから点群データを生成。
生成された点群データはパソコン上で360°回転できるため、現地では見ることのできない視点から確認する事が出来るため現場情報を屋内で管理することができます。
【写真:写真データから生成されたオルソー画像】
点群データ発生状況-1
点群データ発生状況-2
3次元レーザースキャナー計測
測量分野で注目されているレーザーを使用した3次元計測技術です。短時間で(1秒間に30000点以上の点群データ)広範囲の地形・建物などの詳細な3次元座標の取得が可能です。
土木分野に利用されるようになってから10年以上たっていますが、計測機のレベルアップやコンピュータの高性能化にり大量の点群データの処理が可能となりました。 これにより、ある程度限られていた用途が大幅にアップし、活用事例が増加しており、これからますます注目される計測技術となるでしょう。
活用事例
- 橋梁調査
- 建物外観計測
- 地形測量
- 危険地域での遠隔調査
- 文化財等古墳調査
- 地滑り動態観測
- 起工測量
- 3次元施工による現況データの取得
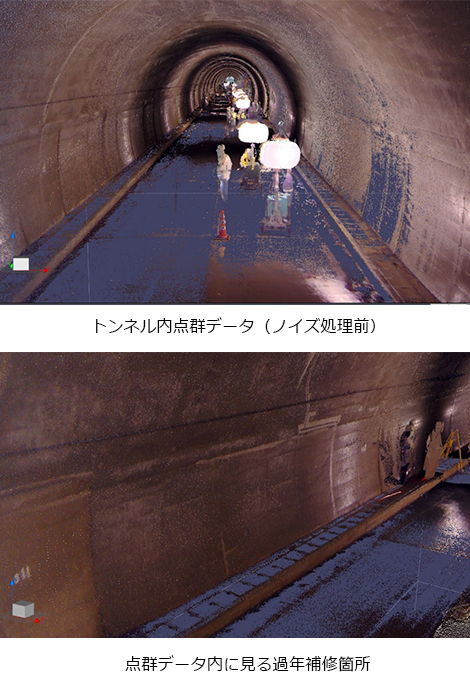
トンネル変状計測
地上型レーザースキャナーにより、内壁を計測し補修設計等の資料に活用します。
データは点群であるため、定期計測する事で構造物の変移や変状をとらえることができます。
ライカRTC360による計測状況-1(トンネル)
ライカRTC360による計測状況-2(ダムサイト作業ヤード下)
RTK-GNSS測量による深浅測量
深浅測量実施箇所付近に設置された基準点を使用しRTK-GNSS測量によりリアルタイムに船位(測深位置のXY座標値)と標高(海底標高)をも求める測量です。
従来の深浅測量では、水面から海底までの深さを測深機によって求め水位標高から換算するため、水位変動の影響や観測後の整理に労力を要していました。 ネットワーク型やRTK-GNSSによる深浅測量では、リアルタイムに位置情報を取得し海底標高を記録するので、観測後の整理もパソコンからデータ出力するだけで横断データ等を得ることができます。
船位決定 RTK-固定局
船位決定 RTK-移動局
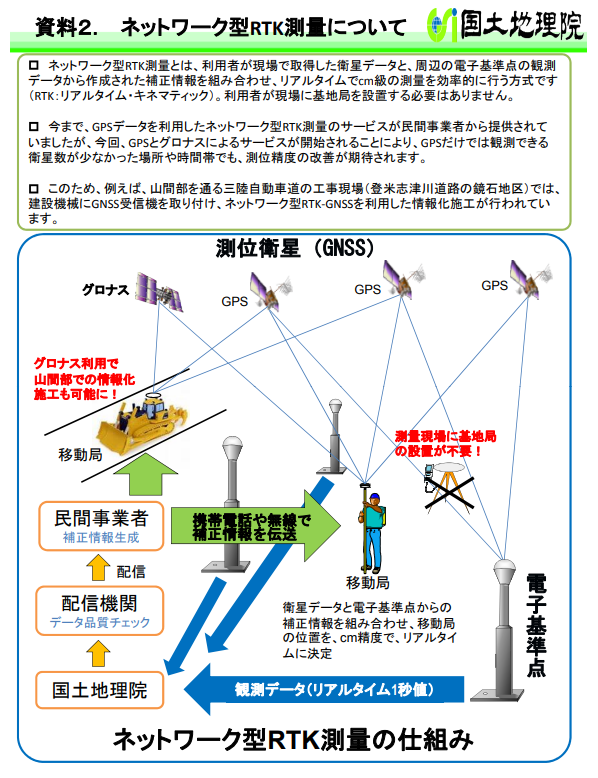
ネットワーク型RTK-GNSS測量

【写真:ネットワーク型RTK-GNSS 標定点観測状況】